Description
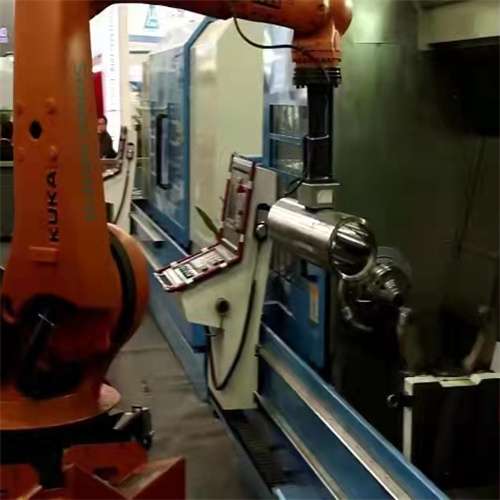
Many products in the traditional process need to be processed and polished. Most manufacturing lines begin to use the manipulator on the robot to hold and transport the workpiece. The manipulator is the part used to hold the workpiece (or tool). The shape, size, weight, material and operation requirements of the object have a variety of structural forms, such as clamping type, holding type and adsorption type. The movement mechanism enables the hand to complete various rotation (swing), movement or compound movements to achieve the specified actions and change the position and posture of the object being grasped. So as to meet the technological requirements of multi-face machining and polishing.
Before clamping, mechanical fixtures are used to transport and clamp the workpiece. The speed is very slow, and the production efficiency is very low. It also needs to cooperate with various swings, movements, and compound movements to realize the transfer of the workpiece to the specified position, which will also cause the workpiece to be moved. Damage and deformation. In order to solve this problem, the robot electromagnet sucker developed and produced by Huaigong Electromagnetic has a small appearance and super magnetic force to adsorb the workpiece without damaging the workpiece. The manipulator installed on the robot is connected to the control system for operation. Increase production efficiency by 2 times!
Advantages of Robot Electromagnet Suction Cups:
1. Fully automated production with automatic reclaiming, positioning and transfer.
2. According to the design of the magnetic force, it can be equipped with automatic product turning and tapping processes;
3. The product scrap rate is low. The robot electromagnet sucker is based on the set magnetic force to handle the workpiece gently and will not cause damage to the workpiece, and will not affect the workmanship of the workpiece.
4. There is no heating problem in the internal coil, maintenance is eliminated, and it is close to zero-cost operation.
5. With small size and large suction, it can fully meet the requirements of multi-directional layout and prevention of welding deformation. Multi-face processing can be completed in one clamping.
6. When welding and clamping, it can shorten the adjustment time of the workpiece by 30%~50%, improve work efficiency and reduce labor costs.
7. The energy is unified, no gas circuit or oil circuit is needed, just connect to the power supply. Energy consumption is negligible, without any leakage or pollution.